Gezgin
< Projeler Sayfası
Proje Adı
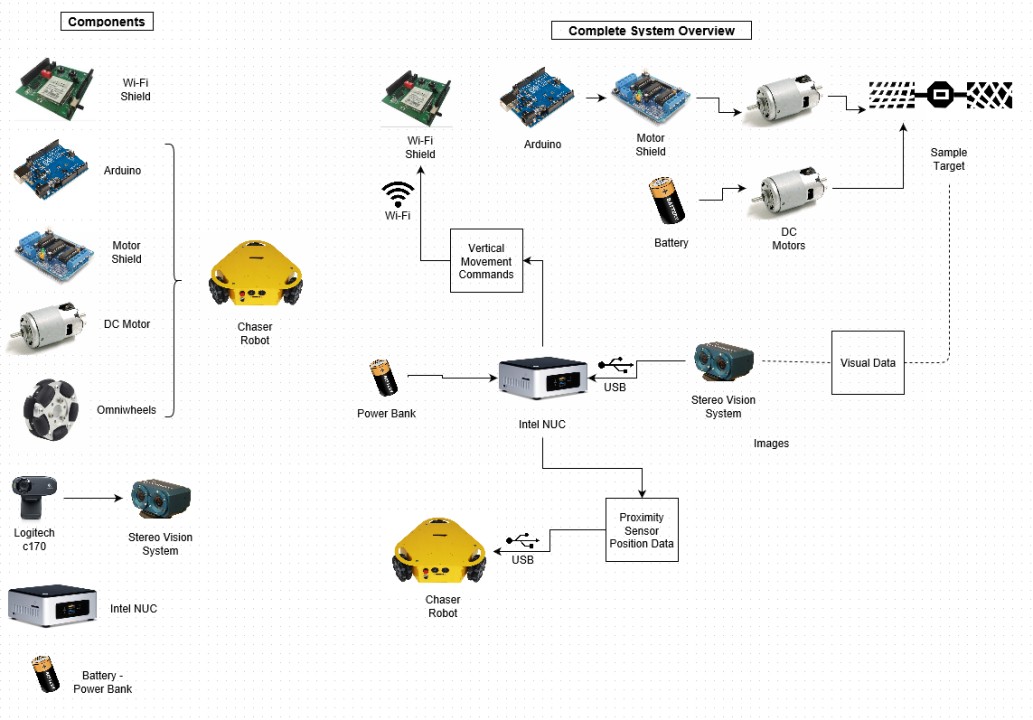
Otonom Uzay Randevu Simülatörü
Şirket Adı
TAI
Şirket Mentoru
Burak Akbulut
Akademik Mentor
Prof. Dr. Hitay Özbay
Asistan
Dilan Öztürk
Takım Üyeleri
Mehmet Alper Oğuzkan, Mert Turgay, Çağıl Sultan Uçar, Semih Ucarı

Özet
Projenin amacı uzayda otonom yanaşma ve kenetlenme benzetiminin gerçekleştirilmesidir. Projede yeni geliştirilen stereo kamera uzaklık sensoru test edilecektir. Bu proje başka uzay otonom kenetlenme projeleri için algoritma ve sistem geliştirme ortamı olarak kullanılabilir. Projede, stereo kamera sisteminden gelen veriler kullanılarak iki araç birbirlerine yanaşacaktır. Çeşitli sensörler ve modüller kullanılarak stereo kamera sisteminin doğruluk oranı test edilmiştir. Ana robot geliştirme ortamı olarak üç adet omni tekerlek ve şasi kullanılmıştır. Bir robot bağımsız bir şekilde hareketine devam ederken, ana robot ona yanaşıp kenetlenecektir. Hedef takibi ve pozisyon verileri için kullanılan stereo kamera sisteminden gelen görüntüler MATLAB kullanılarak işlenmiş ve yine MATLAB ortamında geliştirilmiş dinamik ve kinematik hareket modellemeleri ile robotlar yönlendirilmiştir. Dinamik ve kinematik modellerin amacı uzayın sürtünmesiz ortamının 2 boyutta taklit edilmesidir. Projenin başarısı sistemin ne kadar düzgün çalıştığına göre belli olacaktır. Sistemin kusursuz bir şekilde iki aracı birleştireceği ön görülmektedir.