Wanderer
< Projeler Sayfası
Proje Adı
Çoklu Kamera Sistemi Aracılığıyla Hassas Pozisyon Verisine Dayalı Koordineli Robot Manevraları
Şirket Adı
Karel
Şirket Mentoru
Dr. Nail Çadallı
Akademik Mentor
Prof. Dr. Ömer Morgül
Asistan
Mansur Arısoy
Takım Üyeleri
Ahmet Emre Aydın, Öykü Han, Orhun Olgun, Çağıl Özdoğan, Oğulcan Yayla, Emirhan Burak Yüce

Özet
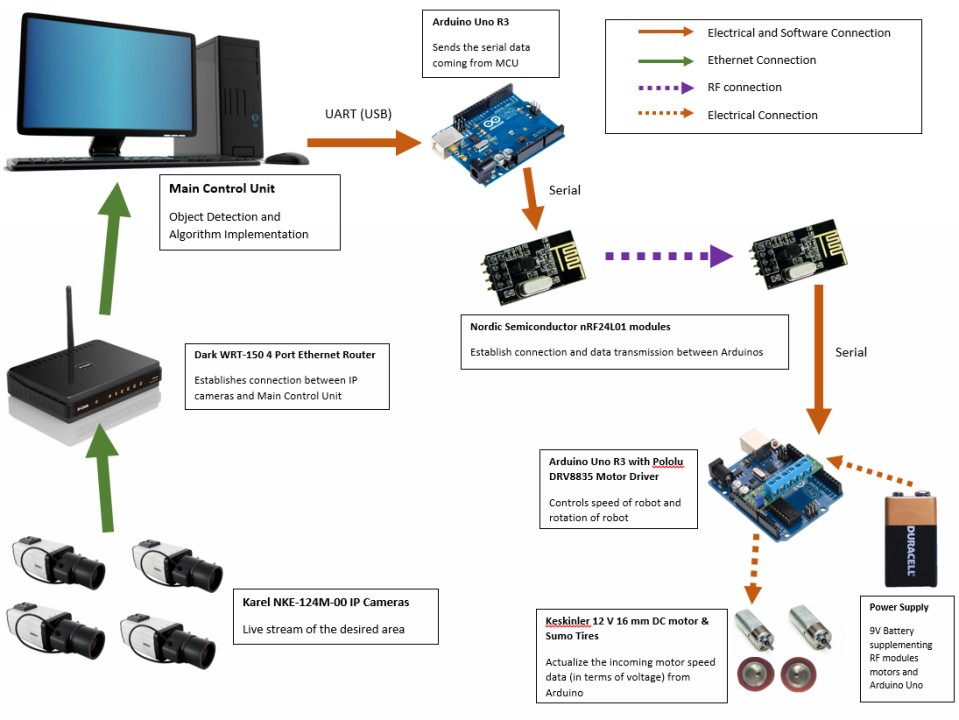
Çok robotlu sistemlerin belirlenen görevleri en verimli ve dayanıklı (robot kaybını tolere edebilen) şekilde gerçekleştirilmesi adına koordineli hareket veya sürü algoritmaları geliştirilmektedir. Algoritma geliştirme alanındaki hızlı gelişmeler sonucunda, olası en yüksek performanslı sürü ya da koordineli hareket algoritmasını ve bu algoritmanın en verimli şekilde çalışabilmesi için gereken sensörleri belirleyen hassas bir test platformunun geliştirilmesinin gerekliliği ortaya çıkmıştır. Proje kapsamında geliştirmiş olduğumuz platform, kullanılan robot sayısı, belirli sayıda deneme sonucundaki başarı oranı, görevin tamamlanması için gereken ortalama süre ve sensörlerin maliyetini hesaba katarak çeşitli algoritmaları fayda ve maliyet analiziyle değerlendirmektedir. İletişimin sadece tekil robotlar ve Ana Kontrol Ünitesi arasında sağlandığı bir test platformunda, proje süresince geliştirilen bütün sürü ya da koordineli hareket algoritmaları, modellenen sensörler ve belirlenen görevlerin kombinasyonu simule edilmektedir. İstenilen görevleri başarılı ve güvenilir bir şekilde gerçekleştirmek için dört adet IP kamera kullanan Hassas Optik Pozisyon Takip Sistemi’nden (HOPTS) yararlanılmıştır. HOPTS, robotlar tarafından uygulanan simulasyonlardaki hareketlerin hassasiyetini korumak amacıyla kullanılmıştır. Hassas test ortamında, bu tip algoritma, sensör ve görev kombinasyonlarının kullanımı robotik sistemin başarısını öngörebilmek adına önem taşımaktadır. Bu sayede, ileride tamamlanması istenilenen görevlere en uygun konumdaki algoritma-sensör-görev kombinasyonu, belirlenen robotik sistem için tespit edilebilmektedir.